| ◀ Previous | TOC | Next ▶ |
2. 線形微分方程式系
System of linear differential equations
2.1 この章で学ぶこと
線形微分方程式系とその解
行列の指数関数
線形微分方程式系の解の漸近挙動1 実固有値の場合
線形微分方程式系の解の漸近挙動1 複素数固有値の場合
2.2 線形微分方程式系とは
線形微分方程式のより広い観点からの整理
行列の指数関数
線形系の挙動についての洞察
システム制御理論の入門
力学系の入門
連立線形微分方程式(線形微分方程式系)
\(\boldsymbol x = [x_1, \dotsc, x_n]^\mathrm T\) に関する 1 階の微分方程式, 初期値問題 \(\boldsymbol x(0) = \boldsymbol x_0\).
\begin{equation} \begin{bmatrix}\frac{d x_1}{dt} \\ \vdots \\ \frac{d x_n}{dt}\end{bmatrix}=\begin{bmatrix}a_{11} & \cdots & a_{1n} \\ \vdots & \ddots & \vdots \\ a_{n1} & \cdots & a_{nn}\end{bmatrix}\begin{bmatrix}x_1 \\ \vdots \\ x_n\end{bmatrix}, \quad \boldsymbol x(0)= \boldsymbol x_0=\begin{bmatrix}x_{1,0} \\ \vdots \\ x_{n, 0}\end{bmatrix}, \tag{2.2} \end{equation}
記号 \({\cdot}^\mathrm T\) はベクトルや行列の転置(transpose)を表す. \([x_1, \dotsc, x_n]^\mathrm T\) は横ベクトルの転置だから縦ベクトルになる.
1 変数線形微分方程式と微分方程式系の初期値問題と解の比較
1 変数線形微分方程式 (\(x, x_0, t \in \mathbb R\), \(a\) は定数)
\[\frac{d x}{d t} = a x, \quad x(0) = x_0 \tag{2.3}\]解は
\[\quad x = x_0 e^{at} = e^{at} x_0\]線形微分方程式系 (\(\boldsymbol x, \boldsymbol x_0 \in \mathbb R^n\), \(t \in \mathbb R\), \(A\) は定数行列)
\[\frac{d \boldsymbol x}{d t} = A \boldsymbol x, \quad \boldsymbol x(0) = \boldsymbol x_0\]解は
\[\boldsymbol x(t) = \underbrace{e^{At}}_{\text{行列}}\underbrace{\boldsymbol x_0}_{\text{ベクトル}} \tag{2.4}\]\(e^{At}\) ?
2.3 行列の指数関数 \(e^A\)
行列の指数関数の定義(matrix exponential)
復習: 指数関数の定義
注意: 指数関数の定義の仕方はひとつではない.
\begin{align*} e^a & (= \exp a) =\sum_{k=0}^\infty \frac{a^k}{k!} \\ & = 1 + a + \frac{1}{2} a^2 + \frac{1}{6} a^3 + \dotsb \tag{2.5} \end{align*}
定義 2.1 (行列の指数関数)
\(A\) を \(n \times n\) 行列とするとき \begin{align*} e^A & (= \exp A) = \sum_{k=0}^\infty \frac{A^k}{k!} \\ & = E + A + \frac{1}{2}A^2 + \frac{1}{6} A^3 + \dotsb \tag{2.6} \end{align*}
ここで \(E\) は単位行列である.
対角行列の指数関数
\(A\) が対角行列 \(D\) のとき
\[\begin{split}D = \begin{bmatrix} d_1 & \cdots & 0 \\ \vdots & \ddots & \vdots \\ 0 & \cdots & d_n \end{bmatrix}\end{split}\]\(e^{tD}\) は
\[\begin{split}e^{tD} = \begin{bmatrix} e^{t d_1} & \cdots & 0 \\ \vdots & \ddots & \vdots \\ 0 & \cdots & e^{td_n} \end{bmatrix}\end{split}\]
行列の指数関数の計算 1: 行列の対角化(復習)
\(A \in \mathbb R^{n\times n}\) が対角化できるとき,
対角化行列 \(J\) は, 列固有ベクトルを並べた行列 \(P\) を用いて次のように表される.
\[J = P^{-1} A P\]復習: 行列のべき, 行列の対角化・標準化
行列の指数関数の計算 2: 対角化行列のべき
定理 2.1
\(A \in \mathbb R^{n\times n}\) が \(J\) に対角化されるとき,
\begin{align*} J^n = P^{-1} A^n P \end{align*}
証明
\begin{align*} J^n &= (P^{-1} A P)^n \\ & = \underbrace{ (P^{-1} A \underbrace{P)(P^{-1}}_{E} A P) \dotsm (P^{-1} A P) }_n \\ & = P^{-1} A^n P \end{align*}
定理 2.2
\(A \in \mathbb R^{n\times n}\) が \(J\) に対角化されるとき,
\[A^n = P J^n P^{-1}\]
行列の指数関数の計算3: 行列の指数関数の対角化
定理 2.3
\(n \times n\) 実数行列 \(A\) (\(A \in \mathbb R^{n \times n}\))が \(J= P^{-1} A P\) と対角化可能なとき,
補足: \(t\) がスカラー(scalar) のとき, \(e^{tA} = e^{At}\) である. どちらの表記も可.
定理 2.3 の証明
\begin{align*} e^{tJ} &= e^{(P^{-1} A P) t} \\ & = E + (P^{-1} A P) t + \frac{(P^{-1}A P)^2 t^2}{2!} + \dotsb + \frac{(P^{-1} A P)^k t^k}{k!} + \dotsb \\ & = P^{-1} E P + P^{-1} (At) P + \frac{P^{-1} A^2 t^2 P}{2!} + \dotsb + \frac{P^{-1} A^kt^k P}{k!} + \dotsb \\ & = P^{-1} \left( E + At + \frac{A^2 t^2}{2!} + \dotsb + \frac{A^k t^k}{k!} + \dotsb\right) P \\ & = P^{-1} e^{tA} P \end{align*}
2.4 線形微分方程式系の解の挙動
行列の指数関数の対角化
線形系の解が以下のとおりとする.
\[\boldsymbol x = e^{tA} \boldsymbol x_0 = P \underbrace{e^{tJ}}_{t \textbf{ 依存はここだけ}} P^{-1} \boldsymbol x_0\]このとき, \(e^{tJ}\) は, \(J\) が対角行列なので
\[\begin{split}e^{tJ} = \begin{bmatrix} e^{\lambda_1 t} & 0 &\cdots & 0\\ 0 & e^{\lambda_2 t} &\cdots & 0\\ \vdots & \vdots & \ddots & \vdots\\ 0 & 0 & \cdots & e^{\lambda_n t} \end{bmatrix}\end{split}\]
行列 \(A\) の固有値が実数の場合
固有値 \(\lambda_i\) に対する \(e^{t\lambda_i}\) の挙動
\[\lambda_i > 0 \quad \Rightarrow \quad e^{\lambda_i t} \to \infty \quad \text{ as } t \to \infty,\]\[\lambda_i = 0 \quad \Rightarrow \quad e^{\lambda_i t} = 1\]\[\lambda_i < 0 \quad \Rightarrow \quad e^{\lambda_n t} \to 0 \quad \text { as } t \to \infty.\]線形システムの挙動は固有値で決まってしまう.
例題 2.1
次の \(A\), \(\boldsymbol x_0\) に対して, \(\boldsymbol x= e^{tA} \boldsymbol x_0\) は \(t \to \infty\) でどのようになるか.
解答例 2.1
\(\boldsymbol x\) は次のように表される.
\[\begin{split}\boldsymbol x = \begin{bmatrix} e^{2t} \\ e^{-t} \end{bmatrix}\end{split}\]すなわち, \(\boldsymbol x = [x_1, x_2]^\mathrm T\) とすると, \(x_1\) は無限大に発散し, \(x_2\) は 0 に近づく.
行列 \(A\) の固有値と \(e^{tA}\) (固有値が実数の場合), まとめ
行列があるベクトルに作用するとき, そのベクトルを固有ベクトルの方向に固有値倍する.
\(A\) の固有値がすべて負であれば, \(e^{tA} \to \boldsymbol 0\).
固有値がすべて 0 であれば, 変化はない.
\[e^{tA}=P e^\boldsymbol 0 P^{-1} = P E P^{-1} = E\]固有値 \(\lambda_i\) が正の成分は発散する. すなわち, 系は固有ベクトル \(\boldsymbol p_{\lambda_i}\) の方向に無限大に向かう.
系が発散しないためには, すべての固有値に対し,
\[\lambda_i \le 0\]であることが必要十分である.
例題 2
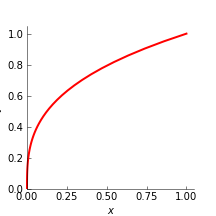
次の微分方程式の解を \(x\)-\(y\) 平面上に描け.
解答例
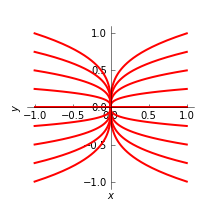
例題 2.3
例題 2.2 の微分方程式の相図を描け.
解答例 2.3(相図)
復習
行列
行列式, トレース, 固有値, 固有ベクトル
対角化可能性
まともにやると大変.
対称行列が直交行列で対角化できることは覚えておくこと.
2 次元正則行列の逆行列. \(A\) を \(2 \times 2\) 実数値正則行列とする.
\[\begin{split}A = \begin{bmatrix} a & b \\ c & d \end{bmatrix} \quad \Rightarrow \quad A^{-1} = \frac{1}{ad-bc} \begin{bmatrix} d & -b \\ -c & a \end{bmatrix}\end{split}\]
Euler の公式
\[e^{\pm i\theta} = \cos \theta \pm i \sin \theta\]または
\[\cos \theta = \frac{e^{i \theta} + e^{-i\theta}}{2}, \quad \sin \theta = \frac{e^{i \theta} - e^{-i\theta}}{2i}\]
共役複素数の固有値
次の行列を定義する.
\[\begin{split}E = \begin{bmatrix} 1 & 0 \\ 0 & 1 \end{bmatrix}, \quad K = \begin{bmatrix} i & 0 \\ 0 & -i \end{bmatrix}\end{split}\]実数行列の固有値は, 実数か共役複素数. \(a, b \in \mathbb R\) として
\begin{align*} J & = \begin{bmatrix} a + b i & 0 \\ 0 & a - b i \end{bmatrix} \\ & = \begin{bmatrix} a & 0 \\ 0 & a \end{bmatrix} + \begin{bmatrix} bi & 0 \\ 0 & - bi \end{bmatrix} \\ & = a E + b K \end{align*}
このとき,
\[e^{tJ} = \underbrace{e^{taE}}_{\text{大きさ}} \underbrace{e^{tbK}}_{\text{回転}}\]つまり, 固有値の実部は大きさの変化を, 虚部は回転の度合いを表す.
ただし, \(e^{tbK}\) が実数行列になるためには, 基底変換が必要である.
行列 \(A\) の固有値と \(e^{tA}\)
\(A\) の固有値の実部がすべて負であれば, \(e^{tA} \to \boldsymbol 0\)(零行列).
固有値がすべて 0 であれば, 変化はない.
固有値 \(\lambda_i\) の実部が正の成分は発散する. すなわち, 系は固有ベクトル \(\boldsymbol p_{\lambda_i}\) の方向に無限大に向かう.
系が発散しないためには, すべての固有値に対し,
\[\mathrm{Re}(\lambda_i) \le 0\]であることが必要十分である. (\(\mathrm{Re}\) は複素数の実部をとる関数.)
実行列の固有値が虚数の場合, 必ず共役複素数のペアになるが, その虚部は, 回転の大きさに関係する.
2.5 二次元線形微分方程式系の分類と相図
行列が対角化できて固有値が全て実数の場合
行列が次の行列の形をしている時の \(\boldsymbol x = e^{tA} \boldsymbol x_0\)
\(a_{22}\) の \(-1\) を \(1\) に変えると, 時間について反転.
固有ベクトルは \([1, 0]^\mathrm T\), \([0, 1]^\mathrm T\).
\(a<0\) のとき, \(e^{tA} \boldsymbol x_0\) は \([0, 0]^\mathrm T\) に収束.
\(a<-1\) のとき, \(x\) 軸の収束のほうが \(y\) 軸より速い.
\(a = -1\) のとき, 同じ速度で収束するので, 相図は放射状になる.
\(-1 < a < 0\) のとき, \(y\) 軸の収束のほうが \(x\) 軸より速い.
\(a = 0\) のとき, \(x\) 軸は変化せず, \(y\) 軸は \(0\) に収束.
\(a > 0\) のとき, \(x\) 軸は発散, \(y\) 軸は \(0\) に収束.

行列が対角化できて固有値が全て実数の場合の相図
行列が対角化できて行列の固有値が共役複素数の場合
次の行列の時の \(\boldsymbol x = e^{tA} \boldsymbol x_0\)
\(a< 0\) ならばうずまきながら \([0, 0]^\mathrm T\) に収束する.
\(a = 0\) ならば回転する(固有値が純虚数).
\(a> 0\) ならばうずまきながら発散する.

行列が対角化できて固有値が共役複素数の場合の相図
2.6 行列が対角化できない場合(固有値が縮退している場合)
次の行列の時の \(\boldsymbol x = e^{tA} \boldsymbol x_0\)
行列は Jordan 標準形
固有ベクトルは \([1, 0]^\mathrm T\) のみ.

行列が対角化できない場合の相図
参考書
講義内容の理解のためには, 次の小寺の 4 章が良い.
小寺平治, なっとくする微分方程式, 講談社, 2000, ISBN=978-4-06-154521-2 https://bookclub.kodansha.co.jp/product?item=0000148737
線形微分方程式系から力学系, カオスへは例えば,
| ◀ Previous | TOC | Next ▶ |