| ◀ Previous | TOC | Next ▶ |
5. 線形微分方程式系
5.1 行列の指数関数の計算
数学ツールの多くは, 行列の指数関数(matrix exponential)を直接計算できる.
[1]:
# scipy.linalg.expm の例
import scipy.linalg
a = [[-1, -1], [1, -2]]
ea = scipy.linalg.expm(a)
print(ea)
[[ 0.24269012 -0.19626633]
[ 0.19626633 0.04642379]]
5.2 線形微分方程式系の観点からの行列の分類
相図(phase diagram)
様々な初期値に対する軌跡を描く.
(線形の場合, \(t<0\) に遡ることも可.)
次のように分類する.
行列が対角化できる場合で, 固有値が全て実数の場合
行列が対角化できる場合で, 固有値が共役複素数の場合
行列が対角化できない場合(Jordan 標準形 \(2 \times 2\))
5.3 行列が対角化できて固有値が全て実数の場合
行列が次の形とする.
\(a_{22}\) の \(-1\) を \(1\) に変えると, 時間について反転.
固有ベクトルは \([1, 0]^\mathrm T\), \([0, 1]^\mathrm T\).
\(a<0\) のとき, \(e^{tA} \boldsymbol x_0\) は \([0, 0]^\mathrm T\) に収束.
\(a<-1\) のとき, \(x\) 軸の収束のほうが \(y\) 軸より速い.
\(a = -1\) のとき, 同じ速度で収束するので, 相図は放射状になる.
\(-1 < a < 0\) のとき, \(y\) 軸の収束のほうが \(x\) 軸より速い.
\(a = 0\) のとき, \(x\) 軸は変化せず, \(y\) 軸は \(0\) に収束.
\(a > 0\) のとき, \(x\) 軸は発散, \(y\) 軸は \(0\) に収束.

\(a=-2\)

\(a=-1\)

\(a=-0.5\)
\(a=0\)

\(a=1\)
5.4 行列が対角化できて行列の固有値が共役複素数の場合
\(a< 0\) ならばうずまきながら \([0, 0]^\mathrm T\) に収束する.
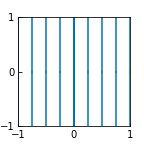
\(a = 0\) ならば回転する(固有値が純虚数).
\(a> 0\) ならばうずまきながら発散する.
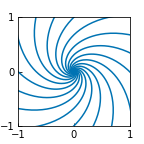
\(a < 0\)
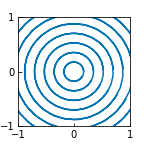
\(a=0\), 固有値が純虚数
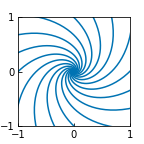
\(a>0\)
行列が対角化できて行列の固有値が純虚数の場合
For any \(a\)
5.5 行列が対角化できない場合(固有値が縮退している場合)
行列は Jordan 標準形
固有ベクトルは \([1, 0]^\mathrm T\) のみ.

\(a=-1\)
5.6 軌跡の表示
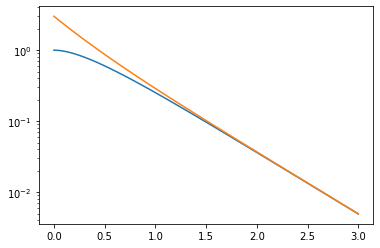
次の行列について, \(e^{tA}\) を考える.
[28]:
#### 初期値 [1, 3]^T のときの x(t), y(t)
import matplotlib.pyplot as plt
import numpy as np
import scipy.linalg
a = np.array([[-3., 1.], [ 1., -3.]])
print('a = ', a)
eigval, eigvec = np.linalg.eig(a)
print('a eigval', eigval)
print('a eigvec\n', eigvec)
x_0 = np.array([[1], [3]])
ts = np.linspace(0, 3)
xs = []
for t in ts:
eta = scipy.linalg.expm(t * a)
x = np.matmul(eta, x_0)
xs.append(x)
xs = np.array(xs)
fig0, ax0 = plt.subplots()
ax0.set_yscale('log')
ax0.plot(ts, xs[:, 0])
ax0.plot(ts, xs[:, 1])
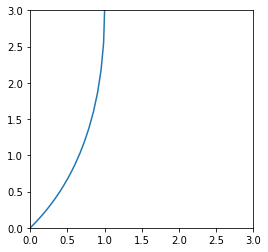
fig1, ax1 = plt.subplots(figsize=(4,4))
ax1.plot(xs[:, 0], xs[:, 1])
ax1.set_xlim(0, 3)
ax1.set_ylim(0, 3)
a = [[-3. 1.]
[ 1. -3.]]
a eigval [-2. -4.]
a eigvec
[[ 0.70710678 -0.70710678]
[ 0.70710678 0.70710678]]
[28]:
(0.0, 3.0)
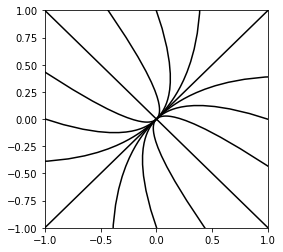
相図
[3]:
#### Phase Diagram
import matplotlib.pyplot as plt
import numpy as np
import scipy.linalg
a = np.array([[-3., 1.], [ 1., -3.]])
print('a = ', a)
eigval, eigvec = np.linalg.eig(a)
print('a eigval', eigval)
print('a eigvec\n', eigvec)
n = 16
x_0s = []
for i in range(n):
x_0s.append(np.array([np.cos(2 * np.pi * i / n), np.sin(2 * np.pi * i / n)]))
fig, ax = plt.subplots(figsize=(4, 4))
ts = np.linspace(-1, 3)
for x_0 in x_0s:
xs = []
for t in ts:
eta = scipy.linalg.expm(t * a)
x = np.matmul(eta, x_0)
xs.append(x)
xs = np.array(xs)
ax.plot(xs[:, 0], xs[:, 1], c='k')
ax.set_xlim(-1, 1)
ax.set_ylim(-1, 1)
a = [[-3. 1.]
[ 1. -3.]]
a eigval [-2. -4.]
a eigvec
[[ 0.70710678 -0.70710678]
[ 0.70710678 0.70710678]]
[3]:
(-1.0, 1.0)
課題
課題 5.1
次の行列 \(A\) と \(\boldsymbol x_0\) に関して, \(A\) の固有値と固有ベクトル, \(e^{tA} \boldsymbol x_0\) を求めよ.
数学ツールを使って解けばよい.
| ◀ Previous | TOC | Next ▶ |